New Arch//Struct Lab website
in Posts on Architecture
A kinetic sculpture driven by servomotors, constructed for Milan Design Week 2025.

The sculpture having a rest
Messing around making a snake game when I couldn’t sleep

Images from the Workshop on Additive Manufacturing and Construction Automation 2024

Light painting with a Fanuc CR10ia/L and Python

For a recent conference, I wanted to quickly demonstrate some robot control from CAD to robot although we’ve not yet integrated an end-effector. So we came upon the idea of light painting!
Room g02a robot control guide
S. Wilcock 2023
Public engagement event

As part of the University of Leeds’ annual public engagement event Be Curious, we formed a team of PGRs to bring a hands-on robotics experience to families in the Leeds area. The focus was on robot sensing and human robot collaboration - as part of this, we used a couple of Turtlebots as a demo of some SLAM techniques, and I took on the programming of a PincherX robot arm which was mounted on a table.
Leeds International Summer School Course
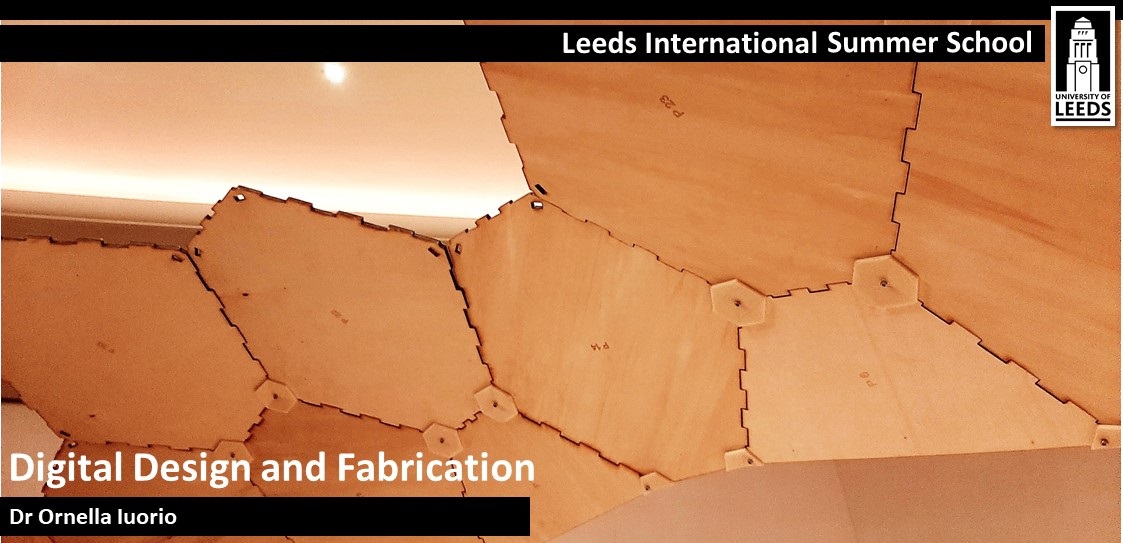
We’re running an in-person Summer module as part of the Leeds International Summer School. The module will be delivered over a 2 week period, covering topics including